
Low Voltage Rotary Actuators STS Series


PRODUCT ADVANTAGES
- Compact design with high torque output.
- Precision manufacturing ensures absolute positioning accuracy within 20 arc seconds.
- Features a large hollow shaft for ease of cable, pipe, and laser equipment installation.
- Built to withstand various conditions with an IP65 rating for environmental protection.
- Designed for longevity with no need for maintenance or grease replacement throughout its service life.
- Durability is assured, maintaining consistent accuracy even after extended use exceeding 15,000 hours.
PRODUCT DESCRIPTION
The STS Series features a low-voltage T-joint design, equipped with dual encoders, a combined drive unit, and a retention brake.

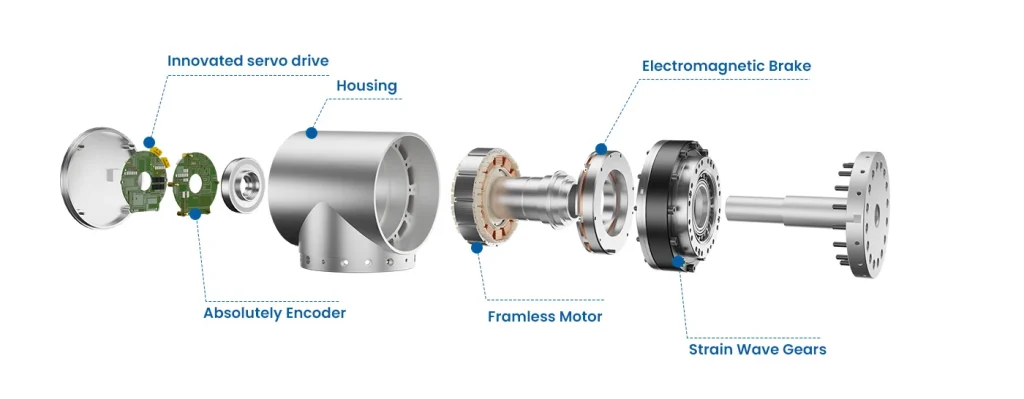


Embedded Servo Drive Communication Interfaces Incorporating.
communication protocols such as EtherCAT, CANopen, and Modbus.
Real-time tunability for PID parameters related to position, speed, and current loop. Includes a built-in ±10V analog input interface. Supports pulse and direction control, I/O interfacing, and RS485 communication.
Compatibility with external encoders and an STO (Safety Torque Off) interface, All within the compact dimensions of DxL=70x67mm.
Integrated Dual Absolute Encoders.
Dual-Loop Positioning Control System Utilizes a 16-bit absolute multi-turn encoder for the output shaft.
Ensures repeatability within a precision range of ±7 arc seconds.
Achieves absolute accuracy within a margin of ±15 arc seconds.
Maintains the real-time absolute position and multi-turn count even during power-off.


Internal Friction Brake
Mechanism Provides a smooth and reliable braking action.
Eliminates any gaps or play in the system.
Ensures consistent performance without the need for recalibration upon power-up.
Features a wear-free design. Suitable for use as an emergency stop mechanism.
SPECIFICATIONS
Specification of Low Voltage Rotary Actuators STS Series
| Model | 14 | 17 | 20 | 25 | 32 | 40 | ||||||||||||||||||
| Harmonic Drive-reduction ratio | 51 | 81 | 101 | 51 | 81 | 101 | 121 | 51 | 81 | 101 | 121 | 51 | 81 | 101 | 121 | 51 | 81 | 101 | 121 | 51 | 81 | 101 | 121 | |
| Permissible Peak Torque at Start and Stop | N·m | 23 | 30 | 36 | 44 | 56 | 70 | 70 | 73 | 96 | 107 | 113 | 127 | 178 | 204 | 217 | 281 | 395 | 433 | 459 | 523 | 675 | 738 | 802 |
| Permissible Maximum Value for Average Load Torque | N·m | 9 | 14 | 14 | 34 | 35 | 51 | 51 | 44 | 61 | 64 | 64 | 72 | 113 | 140 | 140 | 140 | 217 | 281 | 281 | 255 | 369 | 484 | 586 |
| Permissible Maximum Momentary Torque | N·m | 46 | 61 | 70 | 91 | 113 | 143 | 112 | 127 | 165 | 191 | 191 | 242 | 332 | 369 | 395 | 497 | 738 | 841 | 892 | 892 | 1270 | 1400 | 1530 |
| Maximum Rotate Speed | rpm | 107.8 | 67.9 | 54.5 | 98.0 | 61.7 | 49.5 | 41.3 | 78.4 | 49.4 | 39.6 | 33.1 | 78.4 | 49.4 | 39.6 | 33.1 | 58.8 | 37.0 | 29.7 | 24.8 | 49.0 | 30.9 | 24.8 | 20.7 |
| Rated Rotate Speed | rpm | 58.8 | 37.0 | 29.7 | 58.8 | 37.0 | 29.7 | 24.8 | 58.8 | 37.0 | 29.7 | 24.8 | 58.8 | 37.0 | 29.7 | 24.8 | 39.2 | 24.7 | 19.8 | 16.5 | 39.2 | 24.7 | 19.8 | 16.5 |
| Maximum Current | Arms | 8.25 | 6.77 | 6.52 | 13.48 | 10.80 | 10.83 | 9.04 | 21.52 | 17.82 | 15.93 | 14.04 | 29.65 | 26.16 | 24.05 | 21.35 | 48.21 | 42.67 | 37.51 | 33.19 | 84.01 | 68.27 | 59.86 | 54.30 |
| Rated Current | Arms | 3.23 | 3.16 | 2.53 | 10.42 | 6.75 | 7.89 | 6.59 | 12.97 | 11.32 | 9.53 | 7.95 | 16.81 | 16.61 | 16.50 | 13.77 | 24.02 | 23.44 | 24.34 | 20.32 | 40.96 | 37.32 | 39.26 | 39.67 |
| Torque Constant | Nm/Arms | 2.79 | 4.43 | 5.52 | 3.26 | 5.18 | 6.46 | 7.74 | 3.39 | 5.39 | 6.72 | 8.05 | 4.28 | 6.80 | 8.48 | 10.16 | 5.83 | 9.26 | 11.54 | 13.83 | 6.23 | 9.89 | 12.33 | 14.77 |
| Motor Phase resistance | Ohms | 0.358 | 0.358 | 0.358 | 0.103 | 0.103 | 0.103 | 0.103 | 0.1 | 0.1 | 0.1 | 0.1 | 0.05 | 0.05 | 0.05 | 0.05 | 0.032 | 0.032 | 0.032 | 0.032 | 0.012 | 0.012 | 0.012 | 0.012 |
| Motor Phase Inductance | mH | 0.334 | 0.334 | 0.334 | 0.288 | 0.288 | 0.288 | 0.288 | 0.296 | 0.296 | 0.296 | 0.296 | 0.365 | 0.365 | 0.365 | 0.365 | 0.17 | 0.17 | 0.17 | 0.17 | 0.063 | 0.055 | 0.055 | 0.055 |
| Back-EMF | Vrms/krpm | 5.47 | 5.47 | 5.47 | 6.08 | 6.08 | 6.08 | 6.08 | 7.02 | 7.02 | 7.02 | 7.02 | 7.78 | 7.78 | 7.78 | 7.78 | 10.07 | 10.07 | 10.07 | 10.07 | 12 | 12 | 12 | 12 |
| Pole number | 8 | 8 | 8 | 5 | 5 | 5 | 5 | 7 | 7 | 7 | 7 | 5 | 5 | 5 | 5 | 8 | 8 | 8 | 8 | 10 | 10 | 10 | 10 | |
| Supply Voltage | V | DC 48V | ||||||||||||||||||||||
| Motor Insulation | Thermal Class : F(155 ℃ ) | |||||||||||||||||||||||
| Insulaing Resistance : Above 500MΩ ( DC500V ) | ||||||||||||||||||||||||
| Withstanding Voltage and Insulation : AC1500V(1minute) | ||||||||||||||||||||||||
| Size | mm | 74*100*86.5 | 85*113*97 | 115*143*131 | 150*169*170 | |||||||||||||||||||
| Absolutely Encoder | Encoder Type | Dual Absolute | ||||||||||||||||||||||
| Encoder Resolution | Single 17bit/Muilt 16bit | |||||||||||||||||||||||
| One way Positioning Accuracy | Arc sec | 60 | ||||||||||||||||||||||
| Repeated Positioning Accuracy | Arc sec | 20 | ||||||||||||||||||||||
| Overturning Stiffness | ×10^4 Nm/rad | |||||||||||||||||||||||
| Torsional Stiffness | ×10^4 Nm/rad | |||||||||||||||||||||||
| Moment of Inertia | kg*mm^2 | 61.2 | 71.2 | 226.5 | 893.6 | |||||||||||||||||||
| Weight | kg | 1.4 | 2.2 | 4.7 | 8.0 | |||||||||||||||||||




{kind=link}
{kind=link}
{kind=link}