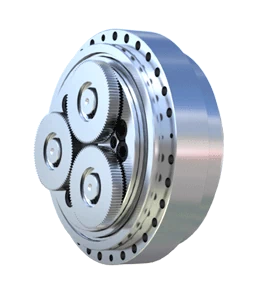
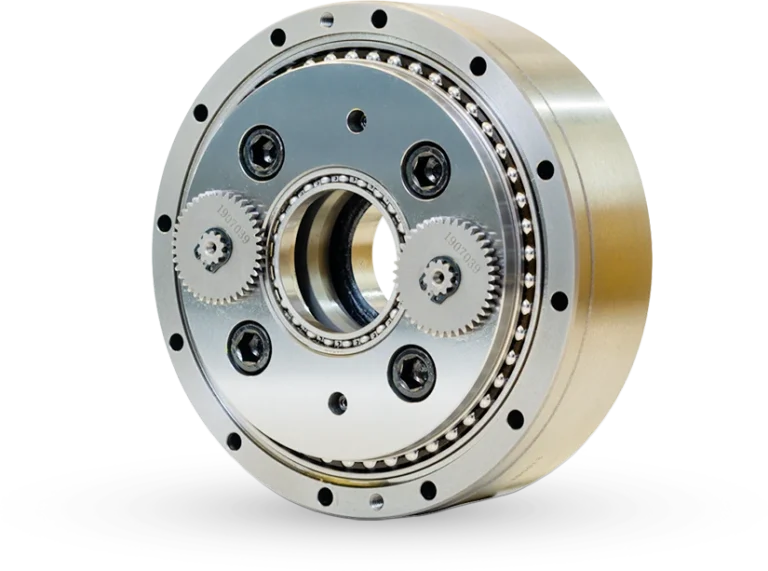
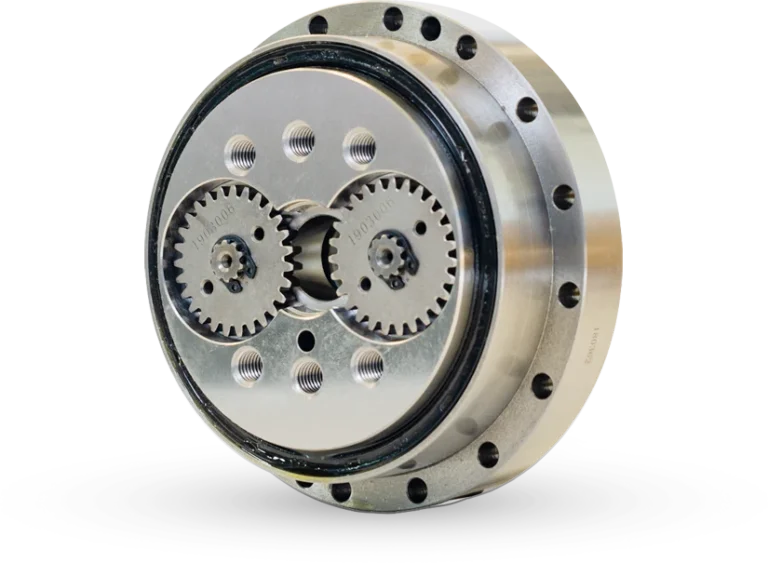
CT-CRD-E C Reducer
The CT-CRD series of reducers is categorized into two distinct series: the solid E series and the hollow C series. These reducers are ideally applied in scenarios that demand precise positioning, such as automatic feeding mechanisms in machining centers, tool changers, high-precision rotary tables, and customized automation solutions.